Here we introduce complete new claw-systems for gripping and aligning as also for sequencing and sorting of parts. The claws can be moved by roboter arms and are especially suited for gripping ofmoving parts, there were the parts have no exact tapping position.
Various Mechanical Designs
Experience and Competence
Fair Price-Performance Ratio
Experience and Competence
Fair Price-Performance Ratio

Phone: 0049 151 1754 3441
Blower-claw
Blower-angle-claw for centrical pre-positioning and gripping of round parts. Opening and closing move.
Blower-parallel-claw for centrical pre-positioning and gripping of round, cylindrical parts. Opening and closing move.
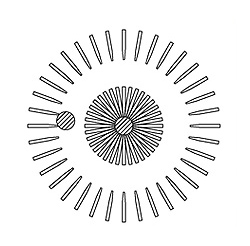
The picture shows the blowers of a blower-claw in top view. There are to see two ringlike arrangements of blowers in opened and closed state (gripping position).
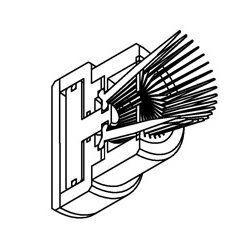
Fächerwinkelgreifer in ISO-Metrischer Darstellung (geöffnet).
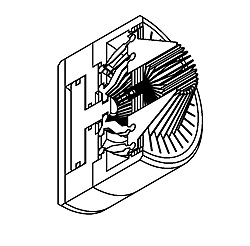
Blower-parallel-claw in ISO-metrical exposition (opened).

Do you have any further questions or need more information?
You can contact us via our contact page.
Phone 0049 2405 408 1650.

Applied for patent
This product has been patented.